
KUKA LWR ROS
A ROS package to control the KUKA LWR 4, both in simulation and for the physical robot.
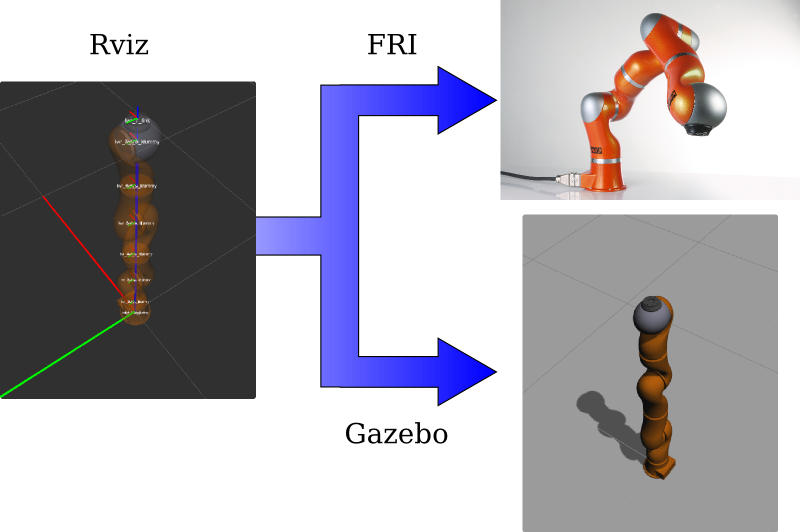
Rviz is used to visualize the sensor data coming from
either the Gazebo simulator or the FRI API interfacing the
KUKA control box.
- github package kuka-lwr-ros
- examples using this package: kuka-lwr-ros-examples