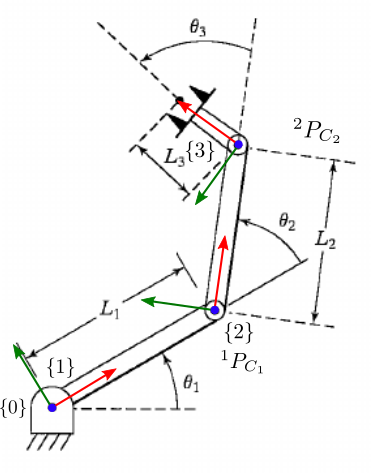
Derivation of the Equation of motion of a three-link-manipulator:
This part is necessary for programming Exercise 6 of
Introduction to Robotics
Mechanics and Control. The following parameters are specified:
\(l1 = l2 = 0.5m\)
\(m1 = 4.6\)Kg
\(m2 = 2.3\)Kg
\(m3 = 1.0\)Kg
\(g = 9.8 m/s^2\)
For link 3 the center of mass is located at the origin of frame {3}
Inertia tensor for link 3 is:
\[{}^{C_s}I = \begin{bmatrix} 0.05 & 0 & 0 \\ 0 & 0.1 & 0 \\ 0 & 0 & 0.1 \end{bmatrix}\]The vector that locate each centre of mass relative to the respective link frame are:
\({}^1P_{C_1} = l_1 \hat{X}_1\)
\({}^2P_{C_2} = l_2 \hat{X}_2\)
\({}^3P_{C_3} = 0\)
Other usefull information:
\({}^2P_3 = l_2 \hat{X}_2\) is the position of link 3 in the frame of reference {2} \({}^1P_2 = l_1 \hat{X}_1\) is the position of link 2 in the frame of reference {1}
The outward iteration for link 3
\[{}^3\omega_3 = \begin{bmatrix} 0 \\ 0 \\ \dot{\theta_1} + \dot{\theta_2} + \dot{\theta_3} \end{bmatrix}\] \[{}^3\dot{\omega}_3 = \begin{bmatrix} 0 \\ 0 \\ \ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3} \end{bmatrix}\] \[{}^3\dot{v}_3 = {}^3_2R \Bigg( {}^2\dot{\omega}_2 \times {}^2P_3 + {}^2\omega_2 \times ({}^2\omega_2 \times {}^2P_3) + {}^2\dot{v}_2 \Bigg)\] \[= {}^3_2R \Bigg( \begin{bmatrix} 0 \\ l_2(\ddot{\theta}_1 + \ddot{\theta}_2) \\ 0 \end{bmatrix} + {}^2\omega_2 \times \begin{bmatrix} 0 \\ l_2(\dot{\theta}_1 + \dot{\theta}_2) \\ 0 \end{bmatrix} + {}^2\dot{v}_2 \Bigg)\] \[= {}^3_2R \left( \begin{bmatrix} 0 \\ l_2(\ddot{\theta}_1 + \ddot{\theta}_2) \\ 0 \end{bmatrix} + \begin{bmatrix} -l_2(\dot{\theta}_1 + \dot{\theta}_2)^2 \\ 0 \\ 0 \end{bmatrix} + {}^2\dot{v}_2 \right)\]\(= \begin{bmatrix} c_3 & s_3 & 0 \\ -s_3 & c_3 & 0 \\ 0 & 0 & 1 \end{bmatrix} \left( \begin{bmatrix} -l_2(\dot{\theta}_1 + \dot{\theta}_2)^2 \\ l_2(\ddot{\theta}_1 + \ddot{\theta}_2) \\ 0 \end{bmatrix} + \begin{bmatrix} l_1\ddot{\theta}_1s_2 - l_1\dot{\theta}^2_1c_2 + gs_{12} \\ l_1\ddot{\theta}_1c_2 + l_1\dot{\theta}^2_1 s_2 + gc_{12} \\ 0 \end{bmatrix}\right)\) \(= \begin{bmatrix} -l_2 c_3 (\dot{\theta}_1 + \dot{\theta}_2)^2 + l_2 s_3 (\ddot{\theta}_1 + \ddot{\theta}_2) \\ l_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2 + l_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2)\\ 0 \end{bmatrix} + \begin{bmatrix} c_3 & s_3 & 0 \\ -s_3 & c_3 & 0 \\ 0 & 0 & 1 \end{bmatrix}\begin{bmatrix} l_1\ddot{\theta}_1s_2 - l_1\dot{\theta}^2_1c_2 + gs_{12} \\ l_1\ddot{\theta}_1c_2 + l_1\dot{\theta}^2_1 s_2 + gc_{12} \\ 0 \end{bmatrix}\)
\(= ... +
\begin{bmatrix}
l_1\ddot{\theta}_1(c_2s_3 + s_2c_3) - l_1\dot{\theta}^2_1(c_2c_3 - s_2s_3) + g(c_3s_{12} + s_3c_{12}) \\
l_1\ddot{\theta}_1(c_2c_3 - s_2s_3) + l_1\dot{\theta}^2_1(c_2s_3 + s_2c_3) + g(c_{12}c_3 - s_{12}s_3) \\
0
\end{bmatrix}\)
\(= \begin{bmatrix}
-l_2 c_3 (\dot{\theta}_1 + \dot{\theta}_2)^2 + l_2 s_3 (\ddot{\theta}_1 + \ddot{\theta}_2)\\
l_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2 + l_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2)\\
0
\end{bmatrix} +
\begin{bmatrix}
l_1\ddot{\theta}_1s_{23} - l_1\dot{\theta}^2_1c_{23} + gs_{123} \\
l_1\ddot{\theta}_1c_{23} + l_1\dot{\theta}^2_1s_{23} + gc_{123} \\
0
\end{bmatrix}\)
\({}^3\dot{v}_{C_3} = {}^3\dot{v}_3\) because \({}^3P_{C_3} = 0\)
\({}^3F_3 = m_3\,{}^3\dot{v}_{C_3}
= \begin{bmatrix}
m_3 l_2 s_3 (\ddot{\theta}_1 + \ddot{\theta}_2) - m_3 l_2 c_3 (\dot{\theta}_1 + \dot{\theta}_2)^2\\
m_3 l_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2\\
0
\end{bmatrix} +
\begin{bmatrix}
m_3 l_1\ddot{\theta}_1s_{23} - m_3 l_1\dot{\theta}^2_1c_{23} + m_3 gs_{123} \\
m_3 l_1\ddot{\theta}_1c_{23} + m_3 l_1\dot{\theta}^2_1s_{23} + m_3 gc_{123} \\
0
\end{bmatrix}\)
\({}^3N_3 = {}^{C_3}I_3\, {}^3\dot{\omega}_3 + {}^3\omega_3 \times {}^{C_3}I_3\, {}^3\omega_3
= \begin{bmatrix}
0 \\
0 \\
I_{zz}(\ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3})
\end{bmatrix}\)
The inward iteration for link 3
\({}^3f_3 = {}^3F_3\)
\({}^3n_3 = {}^3N_3\)
The inward iteration for link 2
force link 2
\({}^2f_2 = {}^2_3R\, {}^3f_3 + {}^2F_2\)
\(= \begin{bmatrix}
c_3 & -s_3 & 0 \\
s_3 & c_3 & 0 \\
0 & 0 & 1
\end{bmatrix}\left(
\begin{bmatrix}
m_3 l_2 s_3 (\ddot{\theta}_1 + \ddot{\theta}_2) - m_3 l_2 c_3 (\dot{\theta}_1 + \dot{\theta}_2)^2\\
m_3 l_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2\\
0
\end{bmatrix} +
\begin{bmatrix}
m_3 l_1\ddot{\theta}_1s_{23} - m_3 l_1\dot{\theta}^2_1c_{23} + m_3 gs_{123} \\
m_3 l_1\ddot{\theta}_1c_{23} + m_3 l_1\dot{\theta}^2_1s_{23} + m_3 gc_{123} \\
0
\end{bmatrix}\right) + {}^2F_2\)
\(=
\begin{bmatrix}
-m_3 l_2 (\dot{\theta}_1 + \dot{\theta}_2)^2 \\
m_3 l_2 (\ddot{\theta}_1 + \ddot{\theta}_2) \\
0
\end{bmatrix} +
\begin{bmatrix}
m_3\,l_1\ddot{\theta}_1s_2 - m_3\,l_1\dot{\theta}^2_1c_2 + m_3\,gs_{12} \\
m_3\,l_1\ddot{\theta}_1c_2 + m_3\,l_1\dot{\theta}^2_1s_2 + m_3\,gc_{12} \\
0
\end{bmatrix} +
\begin{bmatrix}
m_2l_1\ddot{\theta}_1s_2 - m_2l_1\dot{\theta}^2_1c_2 + m_2 g s_{12} - m_2l_2(\dot{\theta}_1 + \dot{\theta}_2)^2 \\
m_2l_1\ddot{\theta}_1c_2 + m_2l_1\dot{\theta}^2_1s_2 + m_2 g c_{12} + m_2l_2(\ddot{\theta}_1 + \ddot{\theta}_2) \\
0
\end{bmatrix}\)
moment link 2
\({}^2n_2 = {}^2N_2 + {}^2_3R\,{}^3n_3 + {}^2P_{C_2} \times {}^2F_2 + {}^2P_3 \times {}^2_3R\, {}^3f_3\)
\(= \begin{bmatrix} c_3 & -s_3 & 0 \\ s_3 & c_3 & 0 \\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} 0 \\ 0 \\ I_{zz}(\ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3}) \end{bmatrix} + \begin{bmatrix} l_2 \\ 0 \\ 0 \end{bmatrix} \times {}^2F_2 + \begin{bmatrix} l_2 \\ 0 \\ 0 \end{bmatrix} \times {}^2_3R\, {}^3f_3\) \(= \begin{bmatrix} 0 \\ 0 \\ m_2l_1l_2\ddot{\theta}_1c_2 + m_2l_1l_2\dot{\theta}^2_1s_2 + m_2 l_2 g c_{12} + m_2l^2_2(\ddot{\theta}_1 + \ddot{\theta}_2) + I_{zz}(\ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3}) \end{bmatrix}\) \(+ \begin{bmatrix} 0\\ 0\\ m_3 l^2_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l^2_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2 \end{bmatrix} + \begin{bmatrix} 0 \\ 0 \\ m_3 l_1 l_2\ddot{\theta}_1c_{23} + m_3 l_1 l_2 \dot{\theta}^2_1s_{23} + m_3 l_2 gc_{123} \end{bmatrix}\)
The inward iteration for link 1
force link 1
\[{}^1f_1 = {}^{\color{green}1}_{\color{green}2}\color{green}R\, {}^{\color{green}2}\color{green}{f_2} + {}^1F_1\]\(= \begin{bmatrix}
c_2 & -s_2 & 0 \\
s_2 & c_2 & 0 \\
0 & 0 & 1
\end{bmatrix}\begin{bmatrix}
-m_3 l_2 (\dot{\theta}_1 + \dot{\theta}_2)^2 \\
m_3 l_2 (\ddot{\theta}_1 + \ddot{\theta}_2) \\
0
\end{bmatrix}\)
\(+ \begin{bmatrix}
c_2 & -s_2 & 0 \\
s_2 & c_2 & 0 \\
0 & 0 & 1
\end{bmatrix}
\begin{bmatrix}
m_3\,l_1\ddot{\theta}_1s_2 - m_3\,l_1\dot{\theta}^2_1c_2 + m_3\,gs_{12}\\
m_3\,l_1\ddot{\theta}_1c_2 + m_3\,l_1\dot{\theta}^2_1s_2 + m_3\,gc_{12}\\
0
\end{bmatrix}\)
\(+ \begin{bmatrix}
c_2 & -s_2 & 0 \\
s_2 & c_2 & 0 \\
0 & 0 & 1
\end{bmatrix}\begin{bmatrix}
m_2l_1\ddot{\theta}_1s_2 - m_2l_1\dot{\theta}^2_1c_2 + m_2 g s_{12} - m_2l_2(\dot{\theta}_1 + \dot{\theta}_2)^2 \\
m_2l_1\ddot{\theta}_1c_2 + m_2l_1\dot{\theta}^2_1s_2 + m_2 g c_{12} + m_2l_2(\ddot{\theta}_1 + \ddot{\theta}_2) \\
0
\end{bmatrix} + {}^1F_1\)
\(=
\begin{bmatrix}
-m_3 l_2 c_2(\dot{\theta}_1 + \dot{\theta}_2)^2 - m_3 l_2 s_2 (\ddot{\theta}_1 + \ddot{\theta}_2) \\
m_3 l_2 s_2(\dot{\theta}_1 + \dot{\theta}_2)^2 + m_3 l_2 c_2 (\ddot{\theta}_1 + \ddot{\theta}_2)
\end{bmatrix}\)
\(+ \begin{bmatrix}
-m_3\,l_1\dot{\theta}^2_1 + m_3 g s_1 \\
m_3 l_1 \ddot{\theta}_1 + m_3 g s_{12} s_2 + m_3 g c_{12} c_2 \\
0
\end{bmatrix}\)
\(+ \begin{bmatrix}
m_2 g s_1 - m_2 l_2 (\dot{\theta}_1 + \dot{\theta}_2)^2 c_2 - m_2 l_2 (\dot{\theta}_1 + \dot{\theta}_2)^2 s_2 \\
m_2 l_1 \ddot{\theta}_2 + m_2 g s_{12} s_2 + m_2 g c_{12} c_2 - m_2 l_2 s_2 (\ddot{\theta}_1 + \ddot{\theta}_2)^2 + m_2 l_2 c_2 (\ddot{\theta}_1 +\ddot{\theta}_2) \\
0
\end{bmatrix}\)
\(+ \begin{bmatrix}
-m_1 l_1 \dot{\theta}^2_1 + m_1 g s_1 \\
m_1 l_1 \ddot{\theta}_1 + m_1 g c_1 \\
0
\end{bmatrix}\)
moment link 1
\({}^1n_1 = {}^1N_1 + {}^1_2R\,{}^2n_2 + {}^1P_{C_1} \times {}^1F_1 + {}^1P_2 \times {}^1_2R\, {}^2f_2\)
\(= 0 + {}^{\color{blue}2}\color{blue}{n_2} + \begin{bmatrix} l_1 \\ 0 \\ 0 \end{bmatrix} \color{red}\times {}^{\color{red}1}\color{red}{F_1} + \begin{bmatrix} l_1 \\ 0 \\ 0 \end{bmatrix} \times {}^{\color{green}1}_{\color{green}2}\color{green}R\, {}^{\color{green}2}\color{green}{f_2}\)
\(= \color{blue}{ m_2l_1l_2c_2\ddot{\theta}_1 + m_2l_1l_2s_2\dot{\theta}^2_1 + m_2 l_2 g c_{12} + m_2l^2_2(\ddot{\theta}_1 + \ddot{\theta}_2) + I_{zz}(\ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3})} \; \hat{Z}\)
\(\color{blue}{+\; m_3 l^2_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l^2_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2} \; \hat{Z}\)
\(\color{blue}{+ \; m_3 l_1 l_2 c_{23}\ddot{\theta}_1 + m_3 l_1 l_2 s_{23} \dot{\theta}^2_1 + m_3 l_2 gc_{123}}\;\hat{Z}\)
\(\color{red}{+\; m_1 l^2_1\ddot{\theta}_1 + m_1 l_1 g c_1} \; \hat{Z}\)
\(\color{green}{ +\; m_3 l_1 l_2 s_2(\dot{\theta}_1 + \dot{\theta}_2)^2 + m_3 l_1 l_2 c_2 (\ddot{\theta}_1 + \ddot{\theta}_2)}\; \hat{Z}\)
\(\color{green}{ +\; m_3 l^2_1 \ddot{\theta}_1 + m_3 l_1 g s_{12} s_2 + m_3 l_1 g c_{12} c_2}\; \hat{Z}\)
Extracting the torque components
\(\tau_i = {}^in^{T}_i\; {}^i\hat{Z}_i\)
\(\boldsymbol{\tau}_1 = \color{grey}{m_2l^2_2(\ddot{\theta}_1 + \ddot{\theta}_2) + m_2 l_1 l_2 c_2 (2\ddot{\theta}_1 + \ddot{\theta}_2) + (m_1 + m_2)l^2_1 \ddot{\theta}_1 - m_2 l_1 l_2 s_2 \dot{\theta}^2_2 - 2m_2 l_1 l_2 s_2 \dot{\theta}_1 \dot{\theta}_2 }\)
\(+\; \color{grey}{ m_2 l_2 g c_{12} + (m_1 + m_2)l_1 g c_1}\)
\(+ \; m_3 l^2_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l_1 l_2 c_2 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l^2_1 \ddot{\theta}_1 + m_3 l_1 l_2 c_{23} \ddot{\theta}_1 + I_{zz}(\ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3})\)
\(\boldsymbol{\tau}_2 = \color{grey}{m_2l_1l_2c_2 \ddot{\theta}_1 + m_2l_1l_2s_2\dot{\theta}^2_1 + m_2 l_2 g c_{12} + m_2l^2_2(\ddot{\theta}_1 + \ddot{\theta}_2)} + I_{zz}(\ddot{\theta_1} + \ddot{\theta_2} + \ddot{\theta_3})\)
\(+ \; m_3 l_1 l_2 c_{23}\ddot{\theta}_1 + m_3 l_1 l_2 s_{23} \dot{\theta}^2_1 + m_3 l_2 gc_{123} + m_3 l^2_2 c_3 (\ddot{\theta}_1 + \ddot{\theta}_2) + m_3 l^2_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2\)
Dynamic Equation
\[\tau = M(\theta)\ddot{\theta} + V(\theta, \dot{\theta}) + G(\theta)\] \[M(\theta)\ddot{\theta} = \begin{bmatrix} I_{zz} + m_3 l^2_1 + m_3 l^2_2 c_3 + m_3 l_1 l_2 c_2 + m_3 l_1 l_2 c_{23} + \color{grey}{l^2_2m_2 + 2l_1l_2m_2c_2 +l^2_1(m_1 + m_2)} & I_{zz} + m_3 l^2_2 c_3 + m_3 l_1 l_2 c_2 + \color{grey}{l^2_2 m_2 + l_1l_2m_2c_2} & I_{zz} \\ I_{zz} + m_3 l^2_2 c_3 + m_3 l_1 l_2 c_{23} + \color{grey}{l^2_2m_2 + l_1l_2m_2c_2} & I_{zz} + m_3 l^2_2 c_3 + \color{grey}{l^2_2 m_2} & I_{zz} \\ I_{zz} & I_{zz} & I_{zz} \end{bmatrix} \begin{bmatrix} \ddot{\theta}_1 \\ \ddot{\theta}_2 \\ \ddot{\theta}_3 \end{bmatrix}\] \[V(\theta, \dot{\theta}) = \begin{bmatrix} m_3 l^2_2 (\dot{\theta}_1 + \dot{\theta}_2)^2 + m_3 l_1 l_2 s_2 (\dot{\theta}_1 + \dot{\theta}_2) + m_3 l_1 l_2 s_{23} \dot{\theta}^2_1 \color{grey}{-m_2 l_1 l_2 s_2 \dot{\theta}^2_2 - 2m_2l_1l_2s_2\dot{\theta}_1\dot{\theta}_2} \\ m_3 l^2_2 s_3 (\dot{\theta}_1 + \dot{\theta}_2)^2 + m_3 l_1 l_2 s_{23} \dot{\theta}^2_1 \color{grey}{+ m_2 l_1 l_2 s_2 \dot{\theta}^2_1}\\ 0 \end{bmatrix}\] \[G(\theta) = \begin{bmatrix} m_3 l_2 g c_{123} + m_3 l_1 g c_1 + \color{grey}{m_2 l_2 g c_{12} + (m_1 + m_2)l_1 g c_1} \\ m_3 l_2 g c_{123} + \color{grey}{m_2 l_2 g c_{12}} \\ 0 \end{bmatrix}\]