
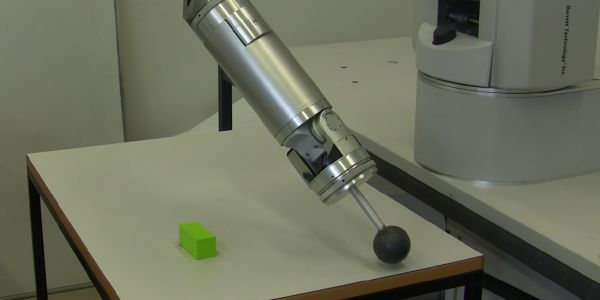
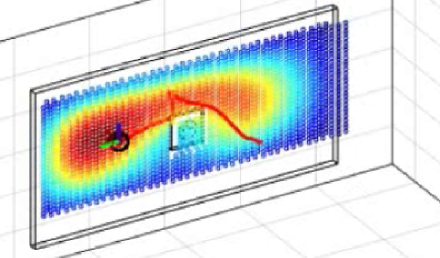
Learning a POMDP policy from human demonstrations
Human teachers demonstrate a search task to a robot in a “Programming by Demonstration” framework.
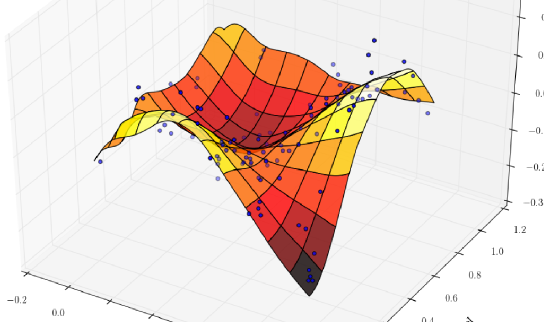
E-PCA
A matlab (E)xponential-PCA package for non-linear dimensionality reduction.
KUKA LWR ROS
A C++ software package which allows to simulate and control the KUKA LWR robot.

Machine Learning toolbox
A machine learning toolbox containing a collection of methods (classification, regression, projection, reinforcement learning)
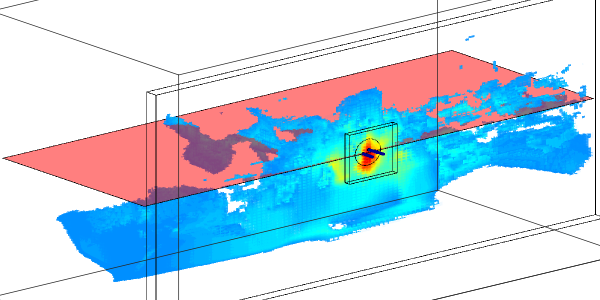
Non-parametric Bayesian state space filter
A Bayesian filter tailored for negative information
Non-parametric regression
A set of regression methods written in C++ with a Python interface.
Point Mass Filter
A Point Mass Filter (PMF) is Bayesian state space estimator written in C++ and Matlab.
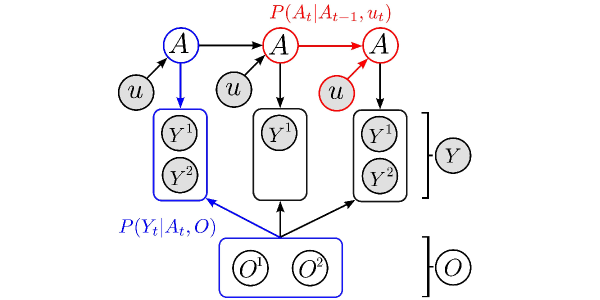
Fitted Policy Iteration for a POMDPs for a continuous state-action space.
A POMDP policy is learned from demonstrations and improved in a Reinforcement learning framework.
Autonomous Rover
An autonomous 6 wheel drive rover.
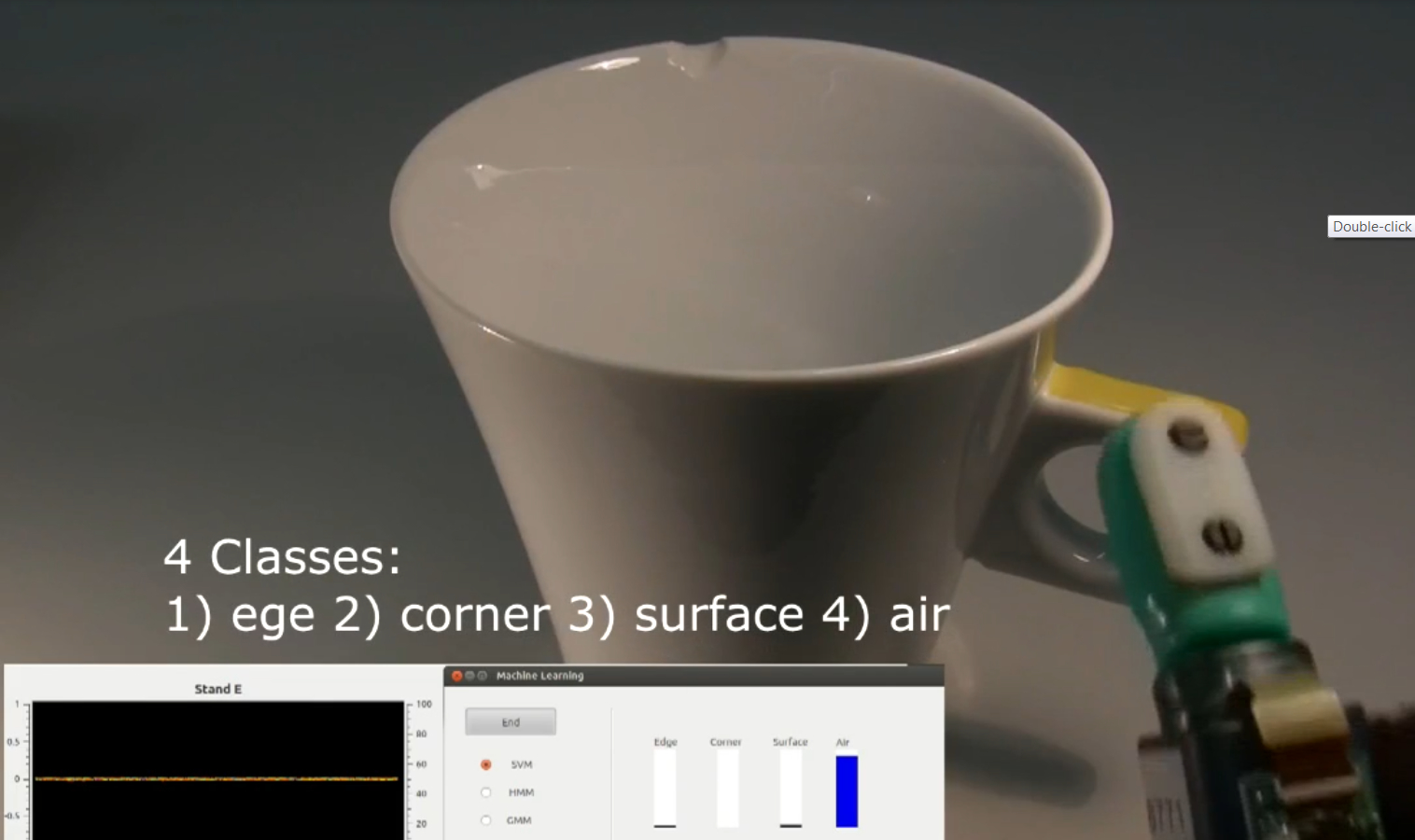
Syntouch tactile classifier
A tacticle classifier for the Syntouch artificial finger sensor.